
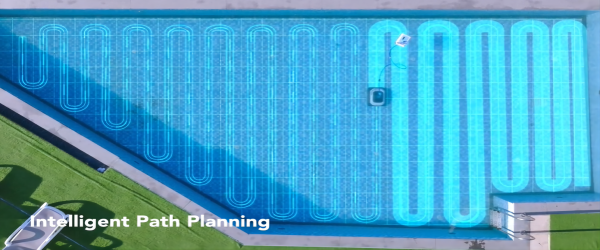
Med utvecklingen av tjänsterobotteknologi,robotar för rengöring av undervattenspoolerhar använts i stor utsträckning på marknaden. För att uppnå automatisk ruttplanering är kostnadseffektiva och adaptiva ultraljudssensorer för undvikande av hinder under vatten.
______________________________________________________________________________________________________________________________________________________________________
DYP:erL04 undervattens ultraljudsavståndssensorger dig avståndet mellan undervattensroboten och det uppmätta objektet, designat för enkel integrering i ditt projekt eller produkt.
Produktfördelar:
■ Mätområde: 3m
■ Blindzon: 5cm
■ Noggrannhet: ≤5 mm
■ skyddsklass: IP68 övergripande gjutning
■ Stabilitet: adaptivt vattenflöde och bubbelstabiliseringsalgoritm
■Underhåll: fjärruppgradering, felsökning av ljudvågsåterställning
■ Övrigt: bedömning av vattenutlopp, återkoppling av vattentemperatur
■ Arbetsspänning: 3,3~5 VDC
■ Utgångsgränssnitt: UART och RS485 tillval
______________________________________________________________________________________________________________________________________________________________________
Relaterade produkter:
